Qiayuan Liao
I'm a third-year Ph.D. student at UC Berkeley, advised by Koushil Sreenath and Pieter Abbeel.
Previously, I was a research intern at Boston Dynamics, where I was fortunate to work with Scott Kuindersma on reinforcement-learning control for the E-Atlas.
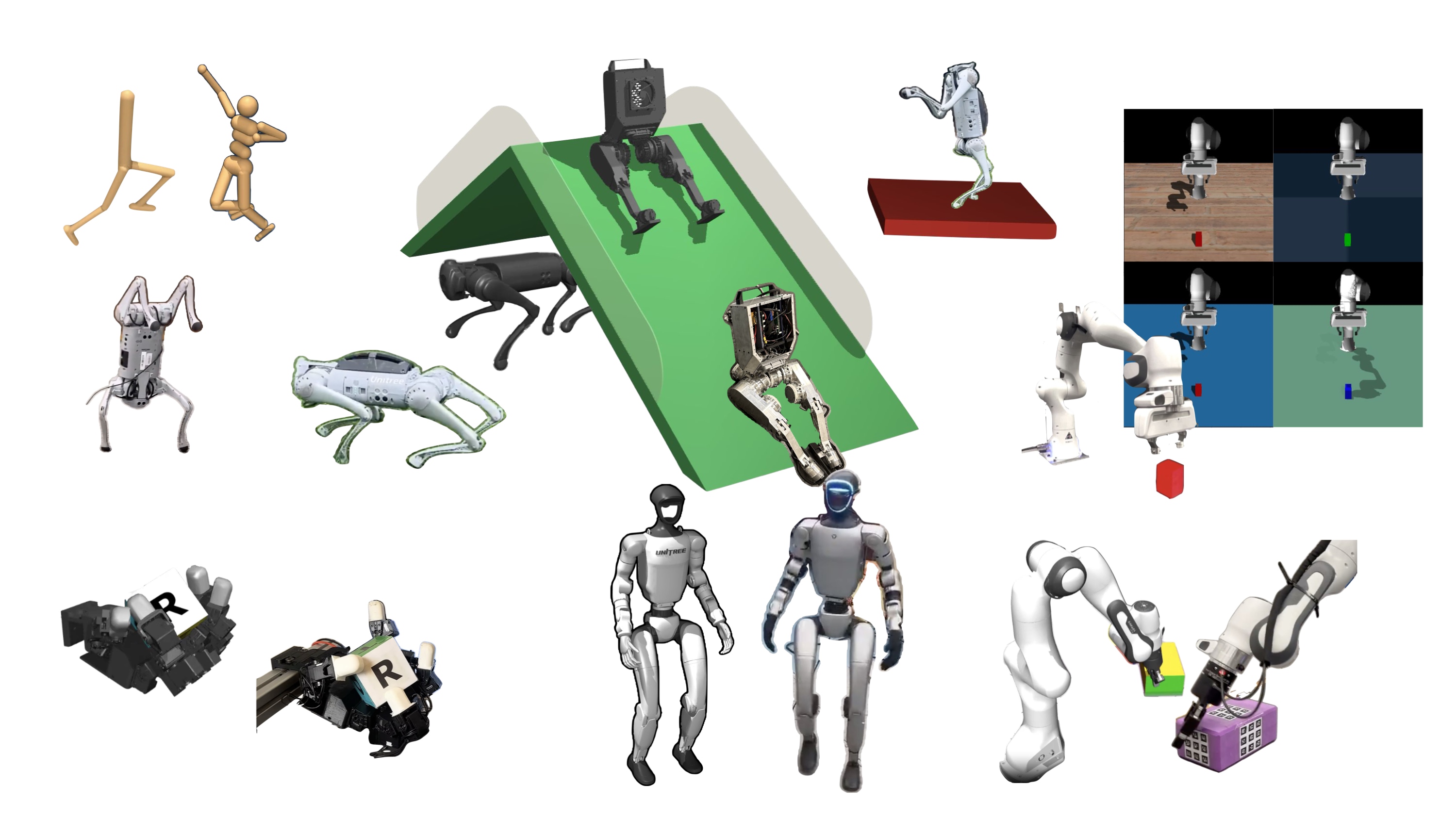
I'm a full-stack roboticist dedicated to creating systems that achieve agile and robust locomotion and manipulation. Toward this goal, I focus on:
(a) Developing novel mechanisms and actuation systems via data-driven co-design;
(b) Unifying learning with planning, estimation, and control.
Scholar
Github
LinkedIn


BeyondMimic: From Motion Tracking to Versatile Humanoid Control via Guided Diffusion
Qiayuan Liao*, Takara Truong*, Xiaoyu Huang*, Guy Tevet, Koushil Sreenath†, C. Karen Liu†
Webpage •
Code
MuJoCo Playground
Kevin Zakka*, Baruch Tabanpour*, Qiayuan Liao*, Mustafa Haiderbhai*, Samuel Holt*, Jing Yuan Luo, Arthur Allshire, Erik Frey, Koushil Sreenath, Lueder A. Kahrs, Carmelo Sferrazza, Yuval Tassa, Pieter Abbeel
Robotics: Science and Systems (RSS) 2025
★ Best Demo Paper Award, RSS ★
Webpage •
Paper •
Code
Berkeley Humanoid A Research Platform for Learning-based Control
Qiayuan Liao, Bike Zhang, Xuanyu Huang, Xiaoyu Huang, Zhongyu Li, Koushil Sreenath
International Conference on Robotics and Automation (ICRA), 2025
Webpage •
Paper •
Code
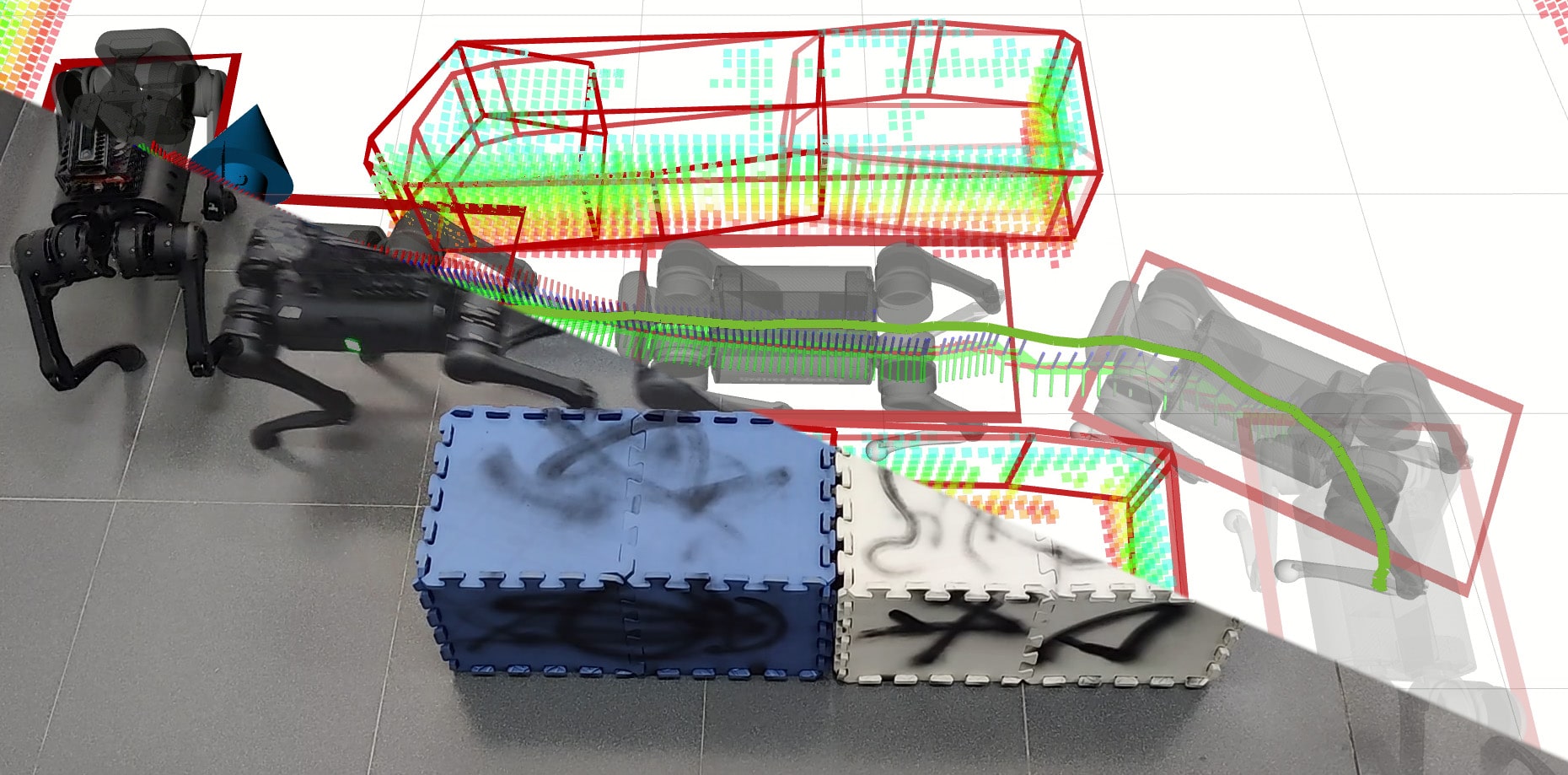
Walking in Narrow Spaces: Safety-critical Locomotion Control for Quadrupedal Robots with Duality-based Optimization
Qiayuan Liao, Bike Zhang, Xuanyu Huang, Xiaoyu Huang, Zhongyu Li, Koushil Sreenath
International Conference on Intelligent Robots and Systems (IROS), 2023
Paper •
Code




will haunt you for the rest of your life.” — System Enhancement Associates, ARC shareware license (1985)
